




自动驾驶汽车发展迅速,但是相比真正的驾驶员,像识别人行横道和交通信号灯,这些简单的任务却无法完成,为了解决这个问题,巴塞罗那的计算机处理中心开发了一项解决方案,通过数字化模拟一座虚拟城市,模拟自动驾驶汽车在遇到各种障碍和车况,包括在雨天和暴风雨条件下的处理办法。
即便埃隆马斯克如何吹嘘他的特斯拉无人驾驶车的安全性能,要让人们对无人车彻底放心,还有一段时间要走,为了对车子进行科学的安全测试,这个网络系统旨在打造一个虚拟世界来帮助无人车的识别工作,包括汽车,行人,路标等物体。无人车的摄像头经过识别,车况分析后将会决定是否转向,刹车,或发出车道变更信号,这套系统会收集包括高速路等普遍路况的大量数据,以便于自动驾驶汽车的分析处理,但是对于一些“死角区域”,像意外车祸,救护车和工程车等这些特殊情况,在数据收集方面还有一些困难。
除此之外,麻烦的地方在于这套模拟系统需要添加大量的街区,道路等备注,而这些文字和图片备注只能通过手动添加,从而加大了不少的工作量,比如特斯拉的自动巡航系统中,就有超过600名开发人员参与了备注图片和添加工作,很明显,这个项目庞大且繁杂。
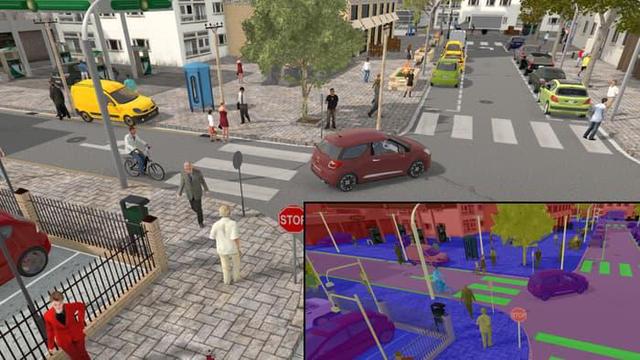
而这个问题现在得到了很好解决,German Ros和他的团队在成功的将图片备注自动的添加到虚拟驾校AIS上,通过最流行的Unity引擎,研究人员们不仅开发了一座有建筑物,人行道,自行车手和停靠巴士等的模拟城市,同时也添加了包括雨雪,季节变化等因素所在的模拟空间,为自动汽车的摄像头选择特定的方向定位,让汽车漫游在虚拟世界,甚至通过汽车视角拍摄照片和视频,模拟器软件能够精确的识别摄像头视角捕捉到的清晰影像,然后系统能够生成大量的真实备注图,这些图片会填充到数据中心,模拟自动汽车的运行过程,帮助自动驾驶汽车的软件系统识别障碍物体。
Ros表示:“人工智能在识别行人和车辆等物体方面越来越强,但是在人行道和交通信号灯方面的识别中还比较欠缺,目前我们还不打算将其用于商业用途,距离正式开发使用还有一段时间。”




