





【EV视界试驾】说到自动辅助驾驶,以目前的门派来看其只有其二。一是以激光雷达、毫米波雷达、视觉摄像头等感知设备组成的融合派,另一个,是单单依靠视觉摄像头的纯视觉派。而今天我们所要提到的这款新车,就是采用了后者。
这里,您是否会认为我们说的是不是特斯拉?答案是“不”。今天的主角是一家大家熟知的自主造车企业,一句“人民需要什么就造什么”的口号震惊四座,没错它就是五菱汽车,而今天我们所要体验的,就是它即将上市的宝骏云朵灵犀版。

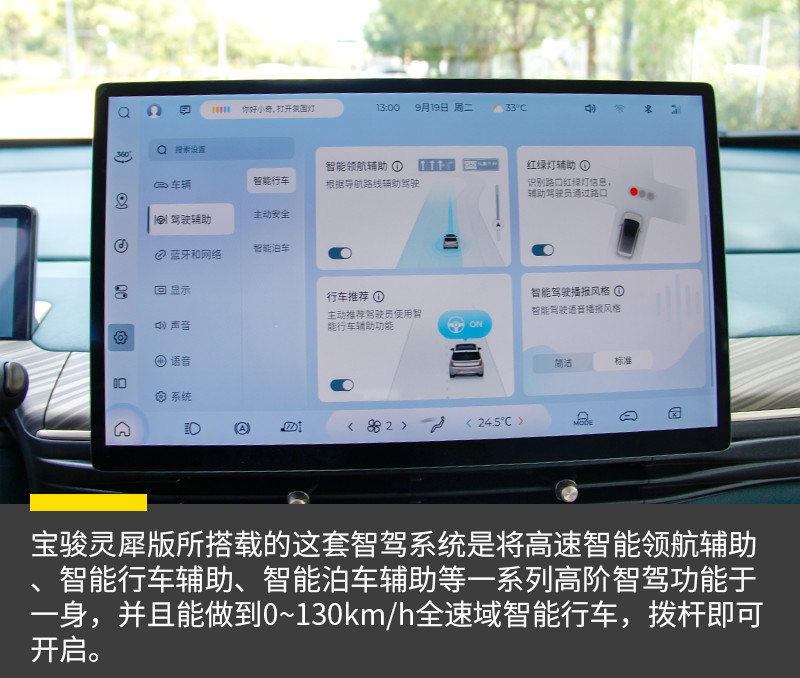
这款车型与之前上市车型最大的不同,就是其在智驾方面做了全面地强化。新车搭载了由宝骏与大疆车载联手打造的“灵犀智驾2.0”,据说是实现行业首个可覆盖全国的高速智能领航辅助,并将支持可跨层记忆泊车、循迹倒车等智驾功能。而今天,我们将针对新车的智驾功能,做一个全面的体验。(之前静态体验:你很能“装”!静态体验宝骏云朵)
我们先来看一下这款车的感知设备,宝骏云朵灵犀版整车的智驾感知设备包括车头一组800万像素惯导双目摄像头、车尾一个300万像素后驾驶辅助单目摄像头 、4个300万像素环视摄像头、一个车头毫米波雷达和车身前后12个超声波雷达。
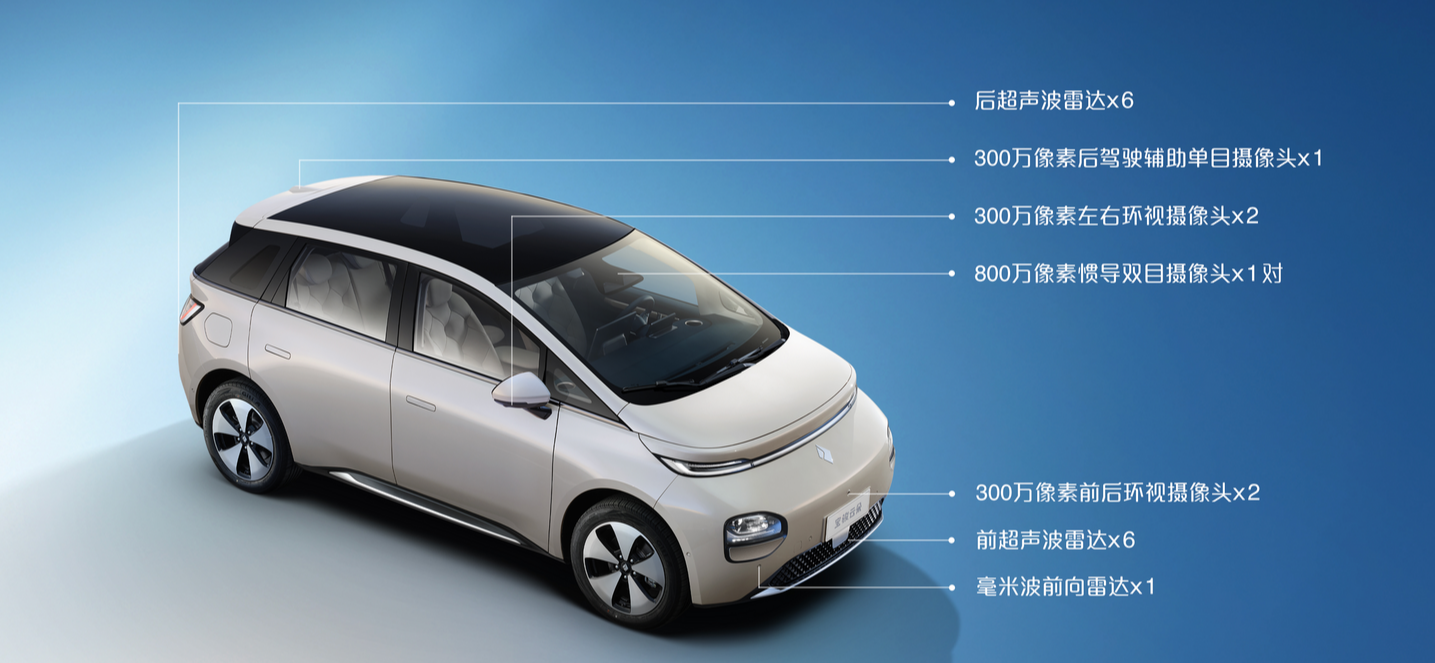
但这里要重点提一下的是,虽然包含了毫米波雷达,但是它最大的作用是用来识别动态的目标识别,对于整个“灵犀智驾2.0”的算法架构上,其权重只占一小点,而或许未来通过视觉感知算法的迭代升级,毫米波雷达终将被取代,这只是时间问题。
回归正题,我们接着来看这套智驾系统。
宝骏云朵灵犀版所配备的这一套800万像素惯导双目摄像头,最大的初衷就是用来平替激光雷达。我们知道,目前一些高端豪华车企所配备的“全家桶”级别的感知设备中,属激光雷达的身价最高,虽然能够为车辆带来长远的感知能力,但是这也导致了整个智驾方案成本的提升。

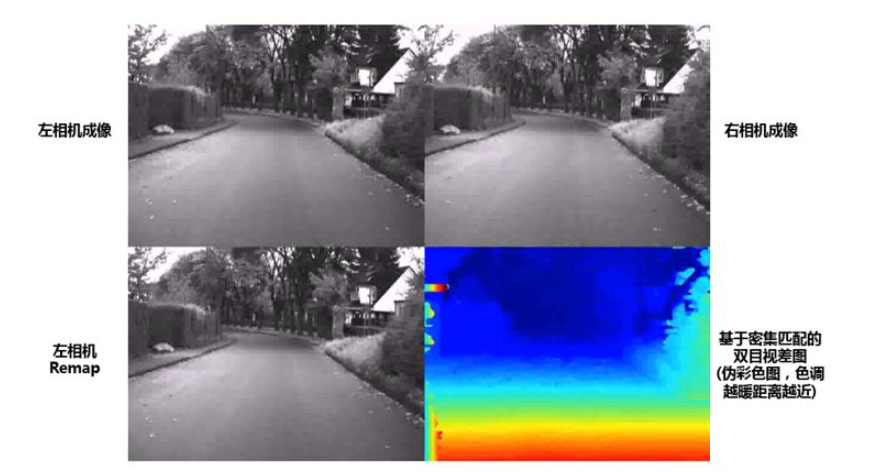
根据厂家介绍,宝骏的这一套800万像素惯导双目摄像头,通过与人眼相似的立体视觉原理获得距离信息形成强泛化、高精度的点云,实现对环境的准确感知,不仅可以完成更加可靠、更加鲁棒性的任意类型障碍物检测和避让,还能应对混乱车道线、大曲率弯道和近距离加塞等复杂路况,并且在弱依赖数据积累的情况下能实现较好的场景泛化。

也就是说这组双目摄像头能够模拟人类的双眼,通过物理产生的位置偏差来实现对于立体轮廓的识别,如此既能达到激光雷达的效能,又可以减少高昂的成本,可谓一举两得。
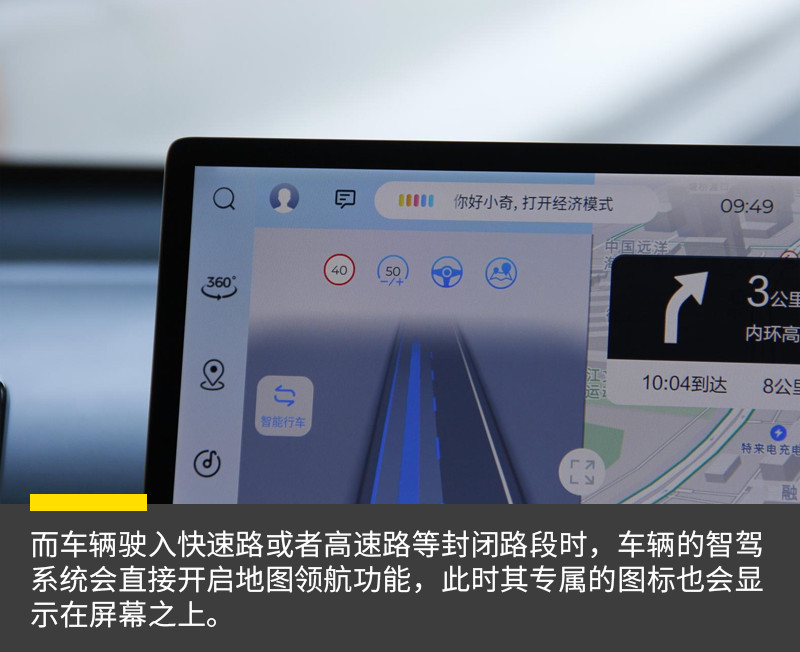
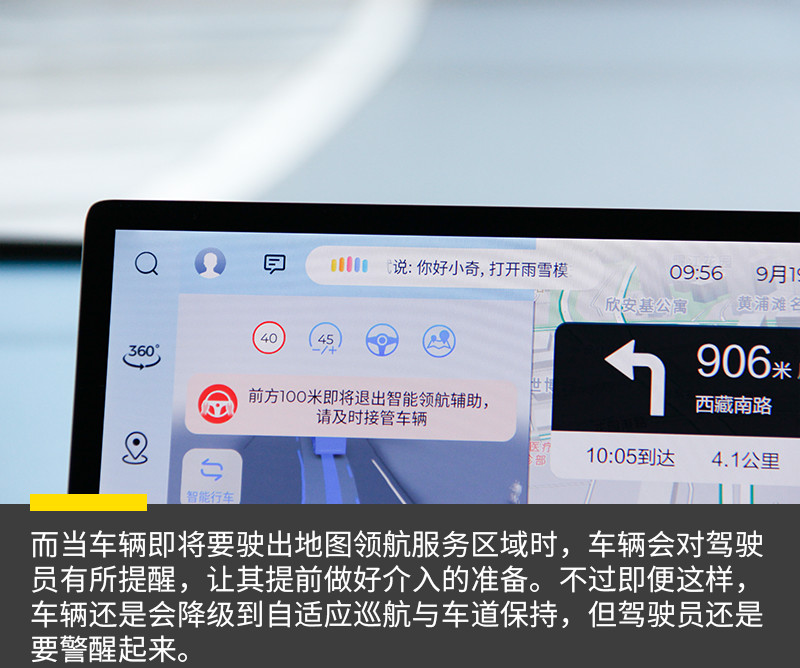
另外,灵犀智驾2.0系统最大的特点就是其不依赖高精地图的属性,因此可以可覆盖全国的“地图”高速智能领航辅助。
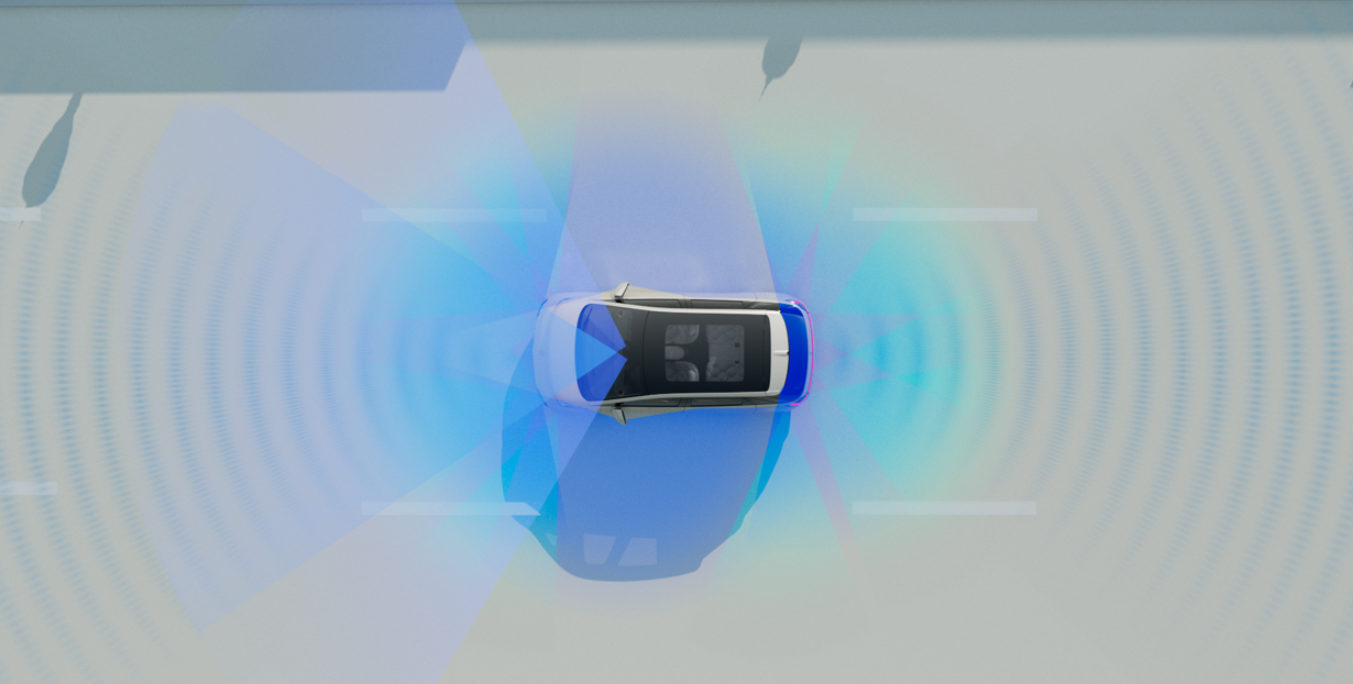
而能做到这一点,无不与其所采用的感知算法方面密切相关,因为灵犀智驾2.0系统采行泊一体的BEV感知方案,因此可在高速、城区、泊车等全场景运行。
所谓BEV感知方案,全程Bird's Eye View,意思就是视觉为中心的俯视图。
一般来说,国内的大部分车企则选择了包含视觉和雷达的多融合感知方案,但它们的共同点都是需要获得视觉信号或者其他传感器的数据来进行综合运算分析,再通过系统的处理来规划行车轨迹。但是,在这个过程中,每个独立传感器收集到的数据往往受到特定视角的局限,经过各自的分析运算后,融合阶段会导致误差叠加,无法拼凑出道路实际情况的准确全貌,给车辆的决策规划带来困难。
而BEV自动驾驶感知利用深度学习网络融合采集多传感器数据,将汽车周围的场景转换为俯视图,实时重建周围的静态道路元素和道路拓扑结构,实高精度的全向感知能力。好比是一个从高处统观全局的“上帝视角”,车上多个传感器采集的数据,会输入到一个统一模型进行整体分析推理生成鸟瞰图,能有效地避免误差叠加。
另外,灵犀智驾2.0系统还采用了OSP(Open Space Planning)决策规划技术,基于轻决策、防御性和预期风险规划的研发思想,让智能驾驶更拟人。通过对地图和结构化场景感知的“弱依赖”,以“轻决策”提升场景泛化能力,实现全国各地都能开。并在决策规划过程中,考虑感知的不确定性和驾驶决策的可能性,管控好可预期的风险,实现真正意义上的防御性驾驶。同时将“驾驶人格”量化,满足不同驾驶员习惯,在保证安全的前提下提升通勤效率。



除了高速领航功能外,灵犀智驾2.0还具备记忆泊车和寻迹倒车功能。
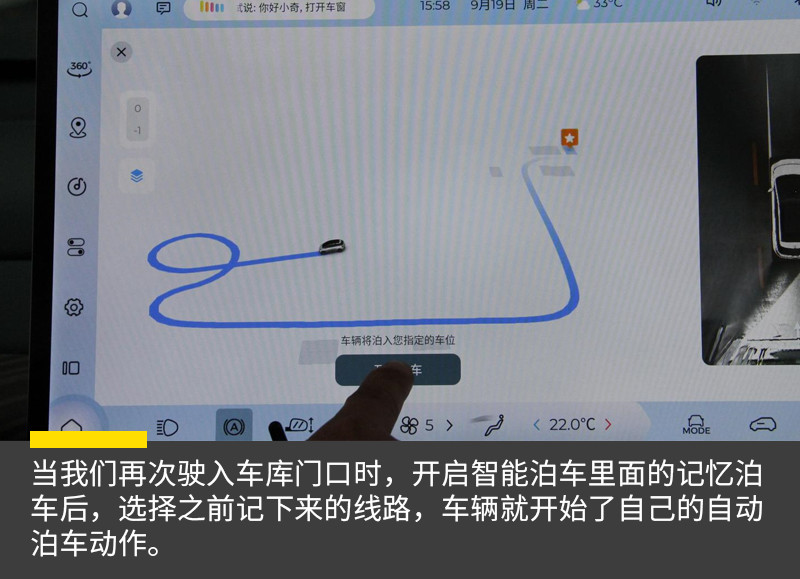
记忆泊车,估计对于那些熟悉智能汽车的用户来说并不会陌生。它主要记住用户通往地库或者露天停车场时所选择的路线,之后用户再次停车,只需启动该功能就能够自主完成整个步骤,为车主省心省力。
灵犀智驾2.0的记忆泊车功能可实现全场景记忆泊车,支持室内、室外及跨层场景的路线记忆。拥有无感定位智能推荐功能,支持在记忆路线任意位置启动;记忆路线长且路径多,最长可支持记忆1km的停车路径,可记忆多达10条泊车路线;还可自主避障、智能绕行、智能优化调整路径。并且该功能可识别垂直、侧方、斜列等常停车位,还能实现空间泊车。并且对于国内特定的地砖/草砖/划线不清晰和磨损车位泊车场景都有针对性优化。

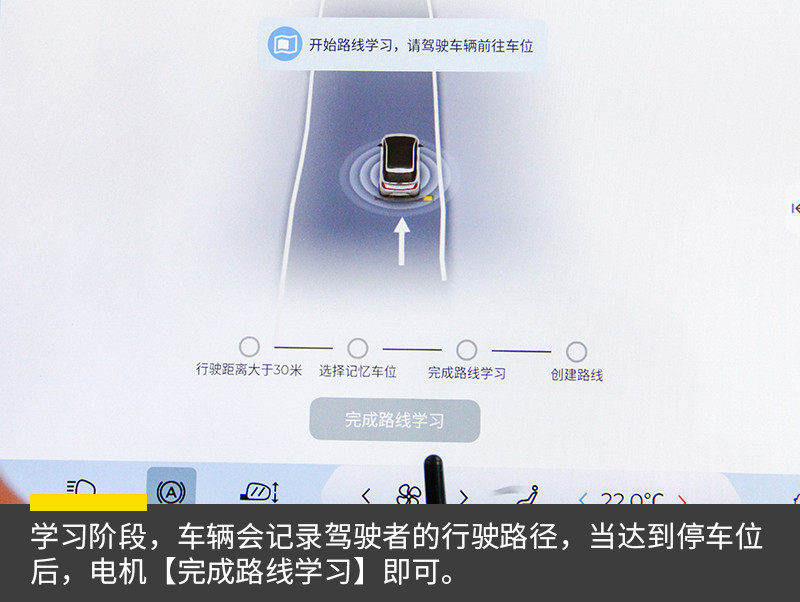


记忆泊车演示(学习)
记忆泊车演示(开启)
另外,其还可识别减速带并顺利通过;并且对于车位地锁也能清晰识别并标记为“不可停”,而最有趣的是,它还可识别限位器确保不会“越位”,正如老司机一般。而在操控上,该功能支车内泊车/车外钥匙或手机APP泊车,并能覆盖99%的常见停车场景。
除了以上对于自动辅助驾驶的体验,我们还针对这款车在动力方面进行一番试驾。
动力方面,宝骏云朵采用三合一扁线水冷电机,集电机、电机控制器、减速器融为一体的电驱系统,最大功率100kW,提供两种续航选择分别为超长续航460km和360km。





在NVH方面,根据厂家介绍,宝骏云朵历经"材料-零件-系统-整车"全场景4层级NVH控制,从源头上提升了整车的NVH水准,同时通过全车24个声学包、毛毡全覆盖式地毯、吸声和隔声多层组合材料、E-booster电子制动系统等方式,将整车的NVH再次提升了一个档次。

写在最后
通过体验,对于宝骏云朵在智驾方面的表现我还是比较肯定的,因为它对于同级别、同价位的车型来说,绝对属于尖子生般的存在。特别是在属于“高端玩家”的纯视觉智驾方案方面,其不仅在技术上抢到头筹,并且将地图领航这一高端功能引入了15万以下车型之中,而这也与五菱所打出的口号相向而行。那么,对于这款适用于家庭出行且拥有同级别更为顶流智驾能力的宝骏云朵您怎么看呢?期待您的答案。

