





【EV视界综合报道】近日,智加科技自主研发的全新纯视觉端到端自动驾驶框架SSR(Sparse Scene Representation)论文成功入选第13届国际学习表征会议(ICLR 2025)。作为深度学习领域三大顶级会议之一,ICLR由Yoshua Bengio和Yann LeCun联合创办,历来以展示人工智能、机器视觉、统计学和数据科学领域的前沿研究成果著称。

SSR框架通过创新性自适应可学习稀疏感知模块,有效替代传统模块化感知架构。实验数据显示,在不依赖任何感知标注数据的情况下:
轨迹误差较主流端到端方案降低27.2%;
安全性能提升51.6%;
推理速度达10.9倍提升;
训练效率实现13倍加速。
在CARLA仿真平台闭环测试中,SSR框架的驾驶得分同样显著超越基于LiDAR输入的SOTA方法,实现了性能和效率的双最优水平,展现出纯视觉方案的独特优势。
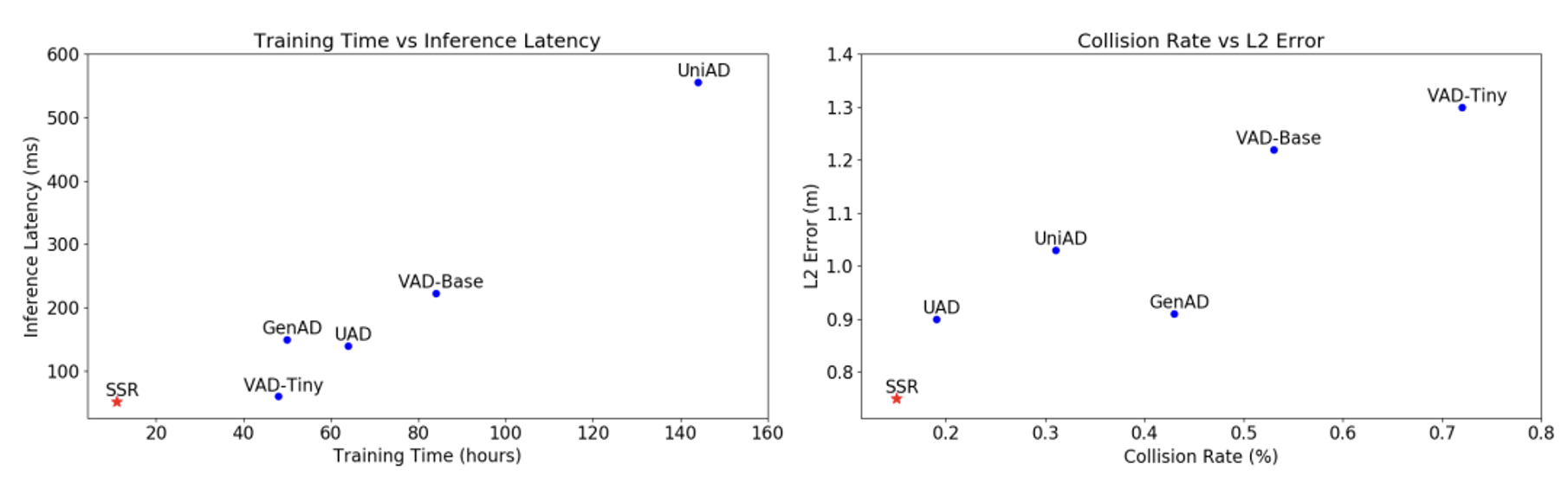
SSR性能效率对比实验
SSR框架通过模拟人类驾驶注意力机制,实现基于导航意图的按需感知,突破传统端到端方案对多感知任务的依赖。该框架的研发标志着One-Model端到端自动驾驶发展方向的重要突破。
同时, 通过建立BEV世界模型,SSR进一步加深了场景的理解能力和对应的规划能力。由于去除掉所有的感知监督任务,SSR不依赖任何标注数据并具备极高的推理速度,这使得其具备非常强的数据扩展性和易部署性。
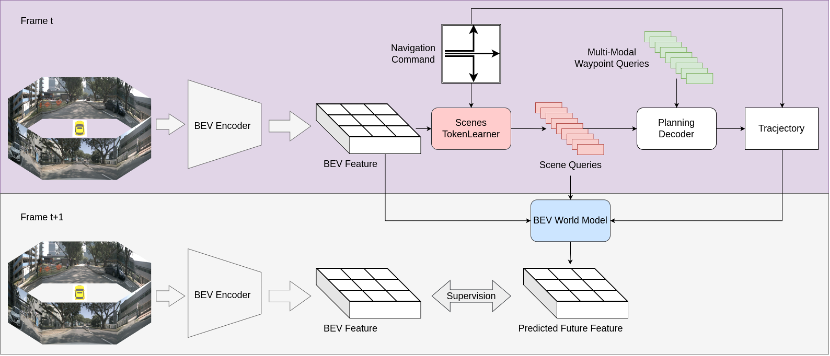
SSR算法框架
依托智加科技自主研发的数据闭环系统,SSR框架已具备快速迭代优化能力。未来,智加计划进一步融合复杂导航提示(如自然语言命令)和视觉语言模型(VLM)提升决策智能,并聚焦系统多冗余设计提升系统安全性,推进L4级自动驾驶架构与L2+前装量产方案的协同发展,为干线物流领域提供兼具高效部署与安全可靠的端到端自动驾驶解决方案。




