





谷歌近日提交自动驾驶车新专利,可以通过识别前车尾灯情况来预判其行为。
谷歌日前为其自动驾驶汽车提交了一项新的专利申请,该技术能对道路上其他汽车的行为作出预判,从而避免出现追尾等事故。判断前车是否会在下个路口转弯或减速是人类驾驶员的基本技能,也是确保不会追尾的关键。此外,驾驶时目视前方是司机的“第二本能”。而对于无人驾驶汽车而言,这些基本能力仍是一个挑战。
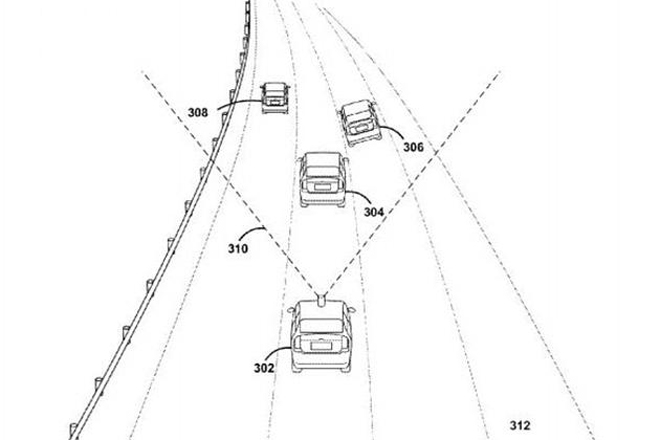
但谷歌日前为其自动驾驶汽车提交了一项专利申请,该技术能检测和追踪道路上其他车辆的刹车和指示灯状态。
通过前置摄像头,这种技术能让谷歌无人驾驶汽车预判其他汽车的运动状态。同时,车载电脑会检测汽车灯的亮度变化,从而判断司机是否打开指示灯。
从计算机的角度讲,谷歌将通过一套算法来识别摄像头中图像的像素,分析其颜色,以确定里面是否有脉冲。如果有脉冲,这套算法将判断司机可能如何操作指示灯,然后将信息反馈给中央系统。
如果这样的专利技术最终能发展成为行业标准,将拥有广泛的应用潜力。谷歌在专利申请文件中称,前面的车辆可以是汽车、卡车、摩托车或公交车。
虽然如此,由于谷歌已经获得了大量自动驾驶汽车相关专利,新申请的这项技术最终能否被实际应用到其自动驾驶汽车中尚不得而知。




