





【EV视界报道】不久前,一台理想ONE与一辆半挂货车发生追尾事故,事故造成两车受损。这起事故,暴露了理想ONE辅助驾驶功能的缺陷。针对这一不足,理想ONE日前发布最新内测程序,以优化其辅助驾驶系统。


不久前,在位于京港澳高速1761公里处,一辆理想ONE与一辆半挂货车发生追尾事故,事故造成两车受损,并未造成断轴以及A柱断裂。车主表示,事故发生时,车辆开启辅助驾驶功能,驾驶员并未介入操作。

根据交警对车主的询问我们获悉,事故发生时,驾驶员开启辅助驾驶系统处在高速巡航阶段,双手放在方向盘上,当车主向右侧观察窗外情况后,与前车发生追尾,驾驶员表示,当时并未介入车辆操作,一直处在车辆自动辅助驾驶状态。
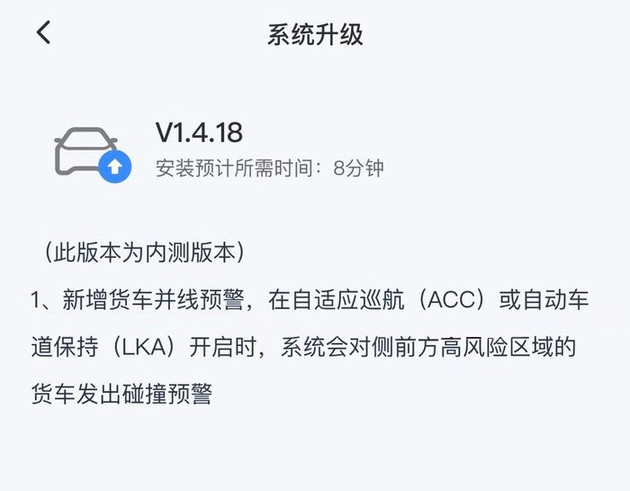
事故的发生,暴露了理想ONE辅助驾驶系统的一些缺陷,针对此问题,理想迅速做出系统优化,并发布最新内测程序。该版本序号为V1.4.18的内测程序,新增货车并线预警功能,在自适应巡航(ACC)或自动车道保持(LKA)开启时,系统会对侧前方高风险区域的货车发出碰撞预警。




